Computer Graphics
学习新知识的方式:Why, What and How
Lecture3. Transformation
2D变换
缩放矩阵(Scale)
反射/对称矩阵(Reflection)
以水平对称为例:切片矩阵(Shear)
旋转变换(Rotate)
逆变换(Inverse)
求原先变换矩阵$M$的逆矩阵$M^{-1}$即可。
齐次坐标
- 为什么要用齐次坐标?
- 将各种变换进行统一,可以用统一的矩阵T表示变换矩阵
增加一维:
- 将各种变换进行统一,可以用统一的矩阵T表示变换矩阵
- 2D点:$(x, y, 1)^T$,or $(x, y, w)^T = (x/w, y/w, 1)$ 并且 $w!=0$
- 2D向量:$(x, y, 0)^T$,
- 向量加0是为了保护向量的平移不变性,同时可以区分向量与点,而且向量与点的计算结果类型也得到直观体现(1为点,0为向量)
- 三维坐标同理
矩阵知识
- 某矩阵的逆矩阵和转置矩阵相同,则该矩阵为正交矩阵
Lecture4. 观测变换(Viewing transformation)
视图变换(View/Model transformation)
简而言之是照相机(观察点)的位置
- Position: $\hat{e}$
- Look-at: $\hat{g}$
- Up direction: $\hat{t}$
照相机摆放到原点,并将观察方向指向-Z,Up方向指向Y。
- 先平移$\hat{e}$到原点
- 旋转观察方向和up方向,直接秋旋转矩阵不好求,但是可以根据正交矩阵逆与转置相同的性质先求旋转的逆矩阵,即:
相机移动之后,模型也需要根据这些矩阵移动到相对应的位置,以保持和相机的相对位置不变。
投影变换(projection transformation)
正交投影(Orthographic projection)
透视投影(Perspective projection)
透视投影->正交投影,+正交投影就得到了透视投影
假设相机在原点,近景z坐标为n,远景z坐标为f。如何挤压远景得到和近景等大的正交投影的画面
- 挤压后近景完全不变,而远景的x、y坐标与近景一致,z坐标不变。
根据相似三角形的对应关系得到最终挤压矩阵$M_{persp->ortho}$:
$ => M{persp->ortho}*M{persp} = M_{ortho}$
Lecture5/6. Rasterization(光栅化)/Antialiasing(反采样/抗锯齿)
光栅化:简而言之就是将图形空间里的models采样到二维图像里,并通过以希望物理设备进行展示,也就是现在的各类显示器。
锯齿:由于采样->光栅化这个过程中的最小单位是像素,是从连续到不连续,因此采样的结果与实际有区别,常常会形成锯齿。因此需要技术来解决这个问题,即抗锯齿。
由傅立叶变换可知,任意函数可以转换为许多不同频率的信号之和,因此对于不同频率的信号不能使用相同频率的采样方法,否则采样的结果会与实际差距太大。
走样:不同频率的函数的采样结果无法区分(说明采样频率有问题),因此出现走样。
- 时域的卷积==频域的乘积
- 高通滤波求边界,低通滤波模糊
反采样的方法
- 增加采样率:像素小,采样率更高
- 这是物理限制。
- 采样前模糊(Pre-Filter):没有改进判断单个像素颜色的方法,而是对图形进行模糊处理
- 如何模糊:低通滤波器过滤掉高频波—>各种滤波器
- 结果:效果还可以,先采样后模糊不行
- 超采样:对单个像素进行多点采样,再将采样结果进行卷积(也就是平均/滤波),就可以实现更精准的模糊效果
z-buffer
- 复杂度:O(n),n是三角形的个数
- 可能不只是对每个像素操作,而是对每个采样点操作,比如超采样
- 处理不了透明物体,因为有$\alpha$
Shadow Mapping
单独的光栅化不考虑物体间的相互遮挡,然而这与实际不符,于是引入Shadow Mapping。但它还是存在走样现象的。
重要现象:阴影中的点只有视点能看到,但是光源看不到
过程:
- 从光源(必须是点光源)看向场景,根据z-buffer的方式记录各点的深度值(以像素为单位,总体上也就是一次光栅化)
- 从摄像机/眼睛看向场景,对看到的每个点,查看光源记录的深度。如果记录的深度与点的深度一致,则该点在阴影外;否则,在阴影内。
问题:
- 只能做硬阴影(point light only),边缘非常锐利
- 数值精度导致深度对比判断有问题
- 光源的分辨率与视点的分辨率不同,又会导致计算的时候会出问题,比如光源分辨率太小就会使得一个像素记录太多信息,即出现了走样。
软阴影的存在就是因为光源存在大小,而每个顶点并不是都能看到所有光源,因此存在本影与半影的区别,也正是因此才有了软阴影。
Lecture7/8/9. Shading
Illumination & Shading
Blinn-Phong着色模型:ambient(环境光) + diffuse(漫反射) + specular(高光)
- 1.基础定义:
- 视点向量:v
- 光源向量:l
- 物体法线向量:n
- 2.Lambert’s余弦定律:$cos\theta = l \cdot n$
- 3.点光源的传播随距离增加而衰减,$r^2$级
- 结合1/2/3 =>
- 反射出去的值diffuse: $L_d = k_d(L_i/d^2)max(0, n \cdot l)$
- $k_d$: 材料本身的漫反射系数,表示为(r,g,b)的三通道color值
- $L_i$: 光的颜色
- 与观察方向v无关,漫反射向各方向的反射相同
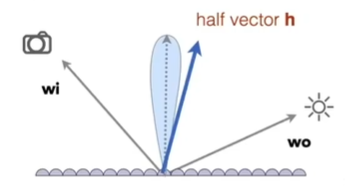
- 4.关于高光的定义
- 镜面反射方向向量: R
- 半程向量: h ($h = \frac{v+l}{||v+l||}$)
- 5.半程向量h与法线向量n是否接近
- 结合4/5 =>
- 镜面反射(高光)specular: $L_s = k_s(L_i/r^2)max(0, n \cdot h)^p$
- $k_s$: 材料本身的漫反射系数,表示为(r,g,b)的三通道color值
- $L_i$: 光的颜色
- $p$: 因为实际高光区域很小,仅仅是余弦不足以表现真实的高光,一般在100~200
- 环境光照ambient:$L_a = k_aI_a$
- $k_a$: 材料本身的漫反射系数,表示为(r,g,b)的三通道color值
- $L_a$: 光的颜色
- 不考虑光线方向、观察方向、法线方向
- 真正的全局光照非常复杂,这里是大胆假设,简化了模型
- 结合ambient + diffuse + specular =>
- $L = L_a + L_d + L_s$
Shading频率
- Flat Shading: 每个三角面一个法线向量,面的颜色处理的一模一样
- 效果较差
- Gouraud shading
- 求出所有顶点法线向量,计算出各顶点颜色值
- 各面求和或加权求和,再归一化
- 三角形内的点通过顶点颜色值作插值得到(即不用求法线向量)
- 求出所有顶点法线向量,计算出各顶点颜色值
- Phong Shading:逐像素
- 求出所有顶点法线向量,计算出各顶点颜色值
- 三角形内的像素点的法线向量通过顶点法线向量作插值得到,再计算颜色值(即要求法线向量)
- 逐像素着色
Grahics Pipeline(图形管线)
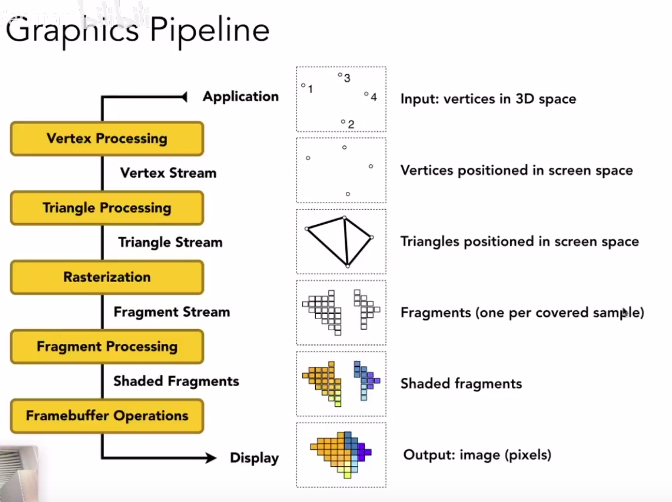
- Vertex Shader: 顶点着色器
- Fragment Shader: 像素/片段着色器
Texture Mapping(纹理映射)
纹理放大:
- 双线性插值
- 双立方(三次)插值
- 效果更好,开销更大
Mipmap
- 快速的、近似的、方形的范围查询
- 根据原纹理计算出更小分辨率的纹理
- 计算level D的Mipmap:
- $L = max(\sqrt{(\frac{du}{dx})^2 + (\frac{du}{dy})^2}, \sqrt{(\frac{dv}{dx})^2, (\frac{dv}{dy})^2})$
- $D = log_2L$
- 现在的查询是离散的,无法计算类似1.2层的结果。因此有三线性插值的方法,实现比较连续的插值结果
- 1.在D层求插值
- 2.在D+1层求插值
- 3.求层与层的插值
- Anisotropic Filter(各向异性过滤)
- 线性插值:$lerp(x, v_0, v_1) = v_0 + x(v_1-v_0)$
- 双线性插值:
- 三角形内任一点$(x, y) = \alpha A + \beta B + \gamma C, \alpha+\beta+\gamma=1, \alpha >=0 \beta>=0, \gamma>=0$
重心:$\alpha = \beta = \gamma = 1/3$
结合重心坐标可以实现各种插值,颜色、纹理坐标、法线向量等等。
- 三维空间中需要先计算插值再投影
- 投影之后没有不变性,这是缺点
纹理应用
- Environment Map(环境映射): 记录环境中各种光照信息
- sphere map
- cube map:将sphere map的内容映射到cube上
- 凹凸映射(Bump mapping)
- 并没有改变任何实际的几何信息,而是通过增加高度来计算新的法线向量,从而改变最终的着色。即:height->normal->shading
- 纹理图中对u求导得:$dp/du = (\Delta u, 0, h(u+1)-h(u))$
- 纹理图中对v求导得:$dp/dv = (\Delta v, 0, h(v+1)-h(v))$
- 最终法线是两者叉积得到的结果,当然得注意方向:$normal = dp/du \cdot dp/dv = (-dp/du, -dp/dv, 1)$
- 位移贴图(Displacment Mapping)
- 也是存了高度,但是真的改了顶点位置
- 模型更细致更好,能更好的表现贴图结果
Lecture10/11/12. Geometry
- 分类:隐式几何,显式几何
- 结合需要进行选择
- 隐式几何:
- 不给实际的点,用隐函数表示点坐标的关系,比如$x^2+y^2+z^2=1$
- 具体解释该几何体是什么很复杂,但是判断单个点的内外位置很容易
- 显式几何:
- 直接给出所有点坐标,或者用参数映射
- 参数映射:
- 遍历(u, v)就能得到所有点的集合
- 例:$f(u, v) = ((2+cosu)cosv, (2+cosu)sinv, sinu)$
- 参数映射:
- 判断内外位置很复杂,判断形状比较简单
- 直接给出所有点坐标,或者用参数映射
隐式表现方法
- CSG
- Constructive Solid Geometry: 将简单的基本几何组合起来得到复杂的几何
- Signed Distance Function(符号距离函数)
- Level Set(水平集)
- Fractal(分形)
显式表现方法
曲线一定经过$p0$和$p_n$,且在$p_0$和$p_n$的切线与$p_0$,$p_1$和$p{n-1}$,$p_n$的切线相同
画线的算法:
- 假设$p_0$是时间0的点,$p_n$是时间1的点,需要找出时间t(t<1)的点在哪。遍历就能画出曲线上的所有点
- 推导过程见下图,就是一个递归求t的过程
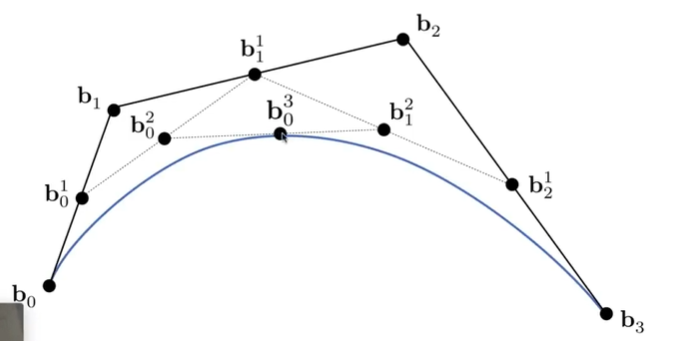
- 总结公式:(n+1)个控制点$p0…p_n$,公式就是$b^n(t)=b_0^n(t) = \sum{j=0}^nb_jB_j^n(t)$,$B_j^n(t)$就是多项展开式的值
- $B_i^n(t) = \left( \begin{matrix} n \ i \end{matrix} \right) t^i (1-t)^{n-i}$
仿射变换下贝塞尔曲线是一致的。先变换后画线/先画线后变换是一样的,因此可以只存控制点,做变换之后再画出来,不用记录所有点。
- 投影变换下不适用。
- 凸包性质:不会超过给定控制点形成的凸包范围
逐段贝塞尔曲线
复杂曲线由多段简单贝赛尔曲线组成,一般这些简单贝赛尔曲线都是用4个控制点。
- 连续性:
- c0连续:曲线A的终点就是曲线B的起点
- c1连续:c0连续,且该重合点切线相同
B-splines(B样条曲线)
比贝塞尔曲线更好,修改的时候只有局部会发生改变
贝塞尔曲面
简单来说就是现在u方向上的时间t1上得到n条贝塞尔曲线,然后再对v方向上的时间t2的n个点再求一次贝塞尔曲线的点。
因此这里需要两个参数$t_1$,$t_2$
Mesh Operations(网格操作)
Mesh Subvision(网格细分)(UpSampling)
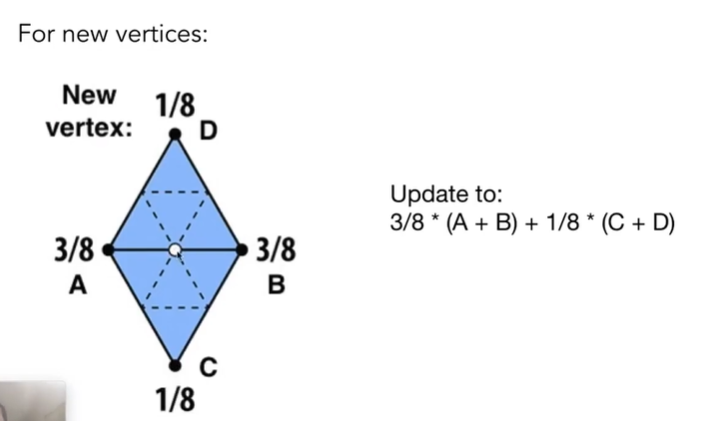
- Loop细分
- 将一个三角形分成4个(各边中点相连)
- 对各新旧顶点进行不同的顶点位置更新
- 对新顶点的更新方式:(白点)
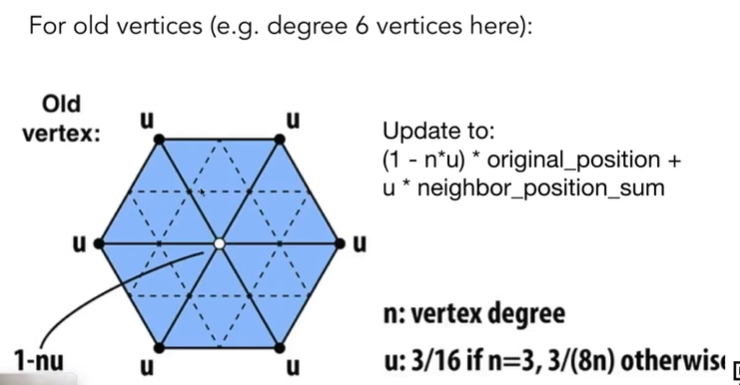
- 对旧顶点的更新方式:(白点)
- n: 该顶点的度
- u: 考虑周围顶点的值
- 对新顶点的更新方式:(白点)
- 只能用三角形面
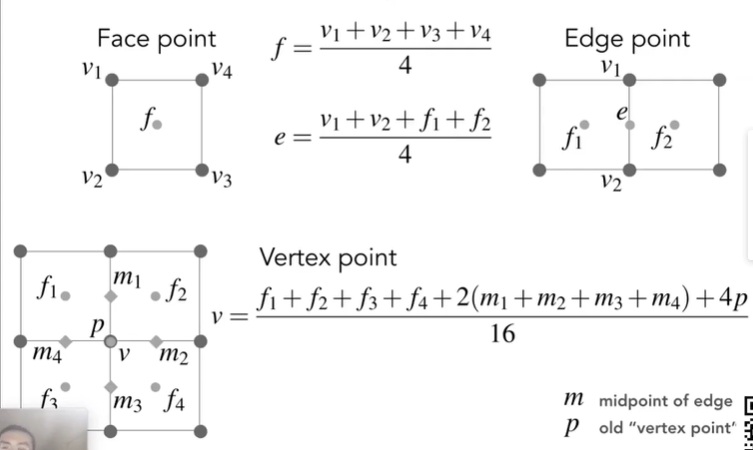
- Catmull-Clark细分
- 基础定义:
- quad face: 四边形的面,non-quad face: 非四边形的面
- Extraordinary vertex: 奇异点,度不为4的点
- 取各边和各面的中点,并且面中点与边中点连接
- 一次细分之后,non-quad面都变成了quad面,代价是多了一个奇异点。因此之后无论再做几次,奇异点都不会再增加,因为non-quad面在第一次就没了。
- 点的更新
- 面的中心点由四边顶点决定,边中点的规则和旧顶点的规则均如下:
- 基础定义:
Mesh Simplification(网格简化)(DownSampling)
- Collapse Edge:一条边坍缩成一个点
- Quadric Error Metrics(二次误差度量):新的点到与原来的边有关的面的距离的平方和最小,就是该边最优的坍缩位置
- 问题:某边的坍缩会影响相邻边的二次误差度量值 => 用最小堆,取最小值,更新受影响的值,更新堆,再取最小值
- 这其实是贪心算法,没法全局取坍缩的边
- Quadric Error Metrics(二次误差度量):新的点到与原来的边有关的面的距离的平方和最小,就是该边最优的坍缩位置
Mesh Regularization(网格正则化)(Same #Triangles)
Lecture13/14/15/16. Ray Tracing
光线追踪需要解决的问题:
- 软阴影(Soft shadows)
- Glossy reflection(类似铜镜这种有反射但是不是纯反射还有自身材质的东西)
- 间接光照(Indirect illumination): 类似于环境光的真实模拟
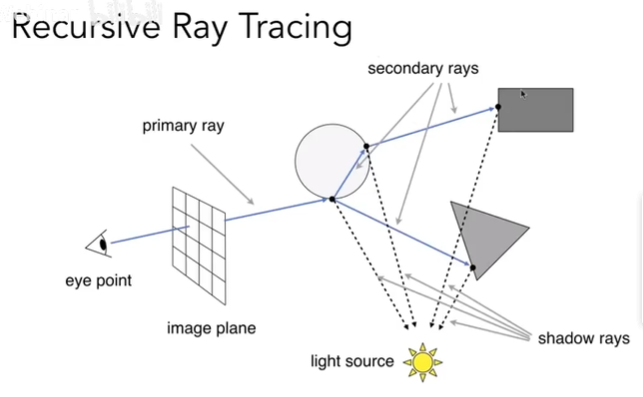
光线追踪类型:
- Pinhole Ray Tracing
- Recursive(Whitted-style) Ray Tracing
光线追踪的技术问题
光线与物体表面的焦点
- 光线:$r(t) = oringin + t * direction, 0 \le t < \infty$
- 与隐式表面的相交计算,假设隐式函数为$f(p) = 0$,有$f(origin+t*direction) = 0$,需要的解是正数解
- 与显式表面相交计算,
- 也就是与三角形求交点 <=> 光线与三角形所在平面求交 + 交点是否在三角形内。交点p,$(p-p’) \cdot N = (origin + t * direction - p’) \cdot N = 0 => t = \frac{p’\cdot N-origin}{direction \cdot N}$,检查:$0 \le t < \infty$
- Moller Trumbore算法:
- 光线上的点与三角形上的点相交有: $origin + t*direction = (1-b_1-b_2)p_0 + b_1p_1+b_2p_2$,最终结果如下:
$\left[ \begin{matrix} t \ b_1 \ b_2 \end{matrix} \right] = \frac{1}{S_1 \cdot E_1} \left[ \begin{matrix} S_2 \cdot E_2 \ S_1 \cdot S \ S_2 \cdot D \end{matrix} \right], \begin{matrix} E_1 = p_1 - p_0 \ E_2 = p_2 - p_0 \ S = O-p_0 \ S_1=D \times E_2 \ S_2=S \times E_1 \end{matrix}, 检查: \begin{matrix} 0 \le t < \infty \ 0 \le b_1 \le 1 \ 0 \le b_2 \le 1 \ \end{matrix}$
- 光线上的点与三角形上的点相交有: $origin + t*direction = (1-b_1-b_2)p_0 + b_1p_1+b_2p_2$,最终结果如下:
加速光线与表面求交的加速(显然不能与每个三角形都求一次)
- Bounding Volumn(包围盒): 用简单的三维物体包围复杂的三维物体,那么计算相交时就需要先和简单物体作相交判断,不相交则直接pass,节省了大量计算量。
- Axis-Aligned Bounding Box(AABB): 轴对齐包围盒,这个常用。与这个包围盒的相交判断算法十分简单,这里不做记录了。
- Uniform Spatial Partitions(Grids): 不适用于大规模的空白,如果空间中只有某一小块有物体,那格子会非常小,这样按步判断计算量反而很大
- 空间划分:
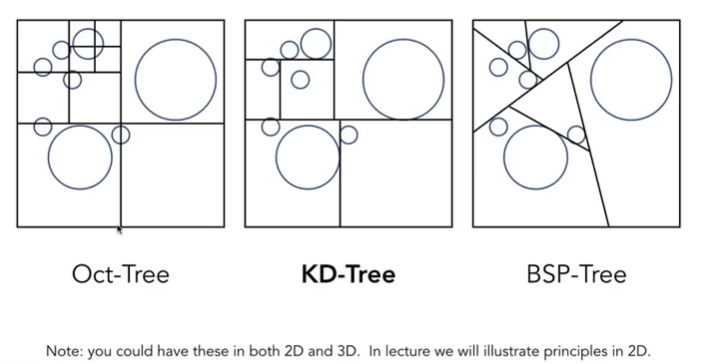
划分的停止条件,某块为空或者块内的物体数量足够少- Oct Tree: 八叉树
- KD Tree: 与八叉树类似,但是递归切分时一次只切分为两块;为了切分均匀,轴向的切分需要有顺序,例:x->y->z->x->y->z…
- 并不是按物体划分,因此后续的物体判断比较复杂
- BSP Tree: 不是横平竖直,随着维度增加,切分计算越来越复杂,不如KD Tree.
- Bounding Volume Hierachy(BVH): 以空间物体划分,生成类似KD Tree的树,空间上可能重叠,终止条件是盒子里物体足够少。
- 问题:空间上不是严格分开,因此如何划分以减少重叠空间就是值得研究的问题
- Bounding Volumn(包围盒): 用简单的三维物体包围复杂的三维物体,那么计算相交时就需要先和简单物体作相交判断,不相交则直接pass,节省了大量计算量。
Basic radiometry(辐射度量学)
物理上准确定义光线的方法。
基础定义:
- Radiant Energy: 电磁辐射的能量,以焦耳为单位$Q [J = Joule]$
- Radiant flux: 单位时间的能量(功率),以瓦特为单位$\Phi = \frac{dQ}{dt}[W = Watt][lm=lumen]^*$,图形学更多用的是功率
- Radiant Intensity: 单位立体角辐射出去的能量,$I(w) = \frac{d\Phi}{dw}[\frac{W}{sr}][\frac{lm}{sr} = cd = candela]$
- 立体角=面积/半径的平方:$\Omega = \frac{A}{r^2}$
- Irradiance:
- 接受辐射,或者是光源往外辐射
- $E(x) = \frac{d(\Phi)}{dA}$
- 联系Lambert’s Cosine Law,因为有这个定义,才有那个法则
- 也能解释季节变化,因为自转导致直射纬度在变
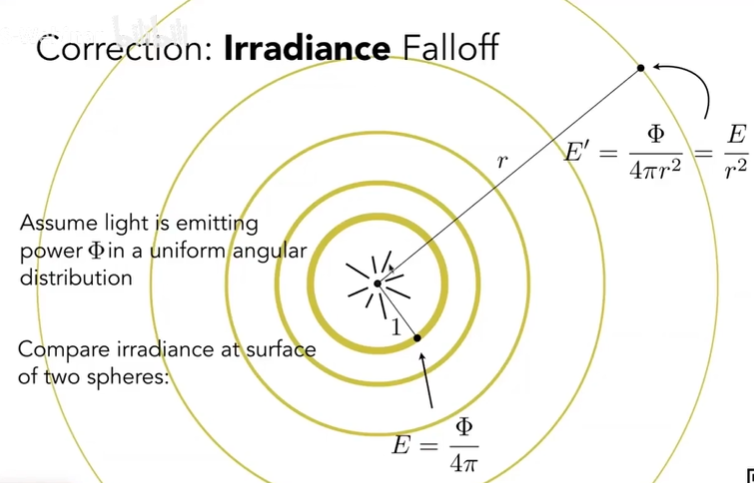
Irradiance衰减图示
- radiance:
- 单位立体角、单位辐射面积上的功率
- $L(p, w) = \frac{d^2\Phi(p, w)}{d\omega dA cos\theta}$,$cos\theta$是irradiance的夹角
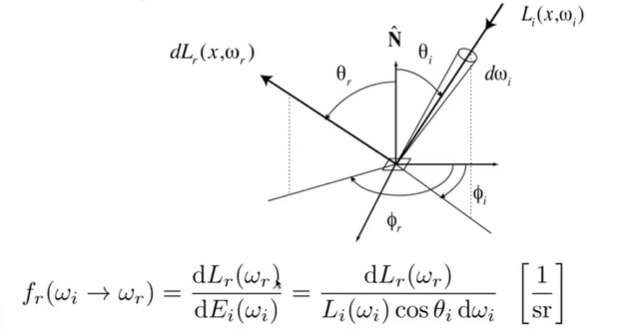
BRDF
BRDF:Bidirectional Reflection Ditribution Function双向反射分布函数,描述一束入射光的反射光的分布
- BRDF:某个入射方向的出射方向的贡献分布计算式
BRDF: 入射光与反射光 - 反射方程(光线计算):某个出射方向的光线计算式(即各个反射量的求和/积分)
- $Lr(p, \omega_r) = \int{H^2}f_r(p, \omega_i \rightarrow \omega_r)L_i(p, \omega_i)cos\theta_i d{\omega}_i$
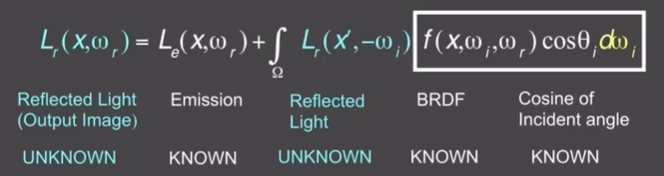
- 渲染方程:
- 反射光 = 自己发光+反射别人的光
- $Lo(p,\omega_o) = L_e(p, \omega_o) + \int{\Omega^+}L_i(p,\omega_i)f_r(p, \omega_i, \omega_o) (n \cdot \omega_i) d{\omega}_i$,其中$n \cdot\omega_i = cos\theta_i$
- 方程简化
- 最终算式:$L = E + KE+K^2E+ K^3E+…$

- 最终算式:$L = E + KE+K^2E+ K^3E+…$
- 光栅化只能做到$E$和$E+KE$
Monte Carlo Intergration(蒙特卡洛积分)
求解难以计算解析解的函数的定积分:$\int_a^b f(x)dx$
- 常规算式:$\int f(x)dx = \frac{1}{N} \sum_{i=1}^{N} \frac{f(X_i)}{p(X_i)}$,$X_i$ ~ $p(x)$,$N$越大越准确
解渲染方程
- Simple蒙特卡洛解法(不考虑自光源)
- 直接光照下
$Lo(a,\omega_o)
=\int{\Omega^+}Li(a,\omega_i)f_r(a, \omega_i, \omega_o) (n \cdot \omega_i) d{\omega}_i
=\frac{1}{N} \sum{i=1}^{N} \frac{L_i(a,\omega_i)f_r(a, \omega_i, \omega_o) (n \cdot \omega_i)}{p(\omega_i)}$
- 直接光照下
- 考虑物体发光,也就是考虑间接反射。
- 只要假设某点也会从其他点接受光线,那么它本身就像是摄像机,于是就形成了递归,递归伪代码如下:
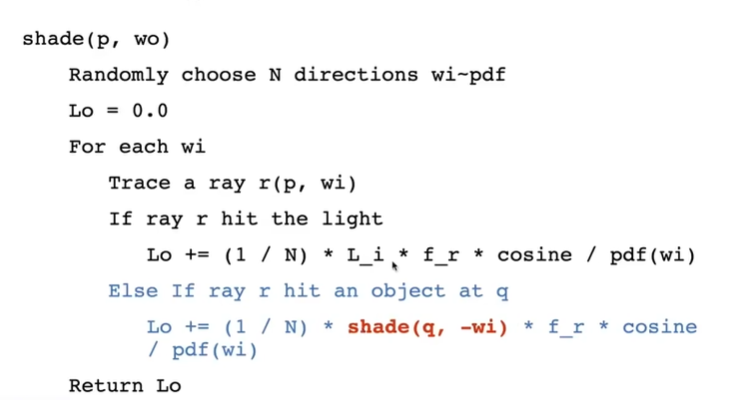
蒙特卡洛方法——N
- 只要假设某点也会从其他点接受光线,那么它本身就像是摄像机,于是就形成了递归,递归伪代码如下:
- 每条入射光产生N条出射光的结果会导致光线数量爆炸。因此上述伪代码无法实现。解决办法也很简单,每次只产生一条,然后在该点随机N次,取N次结果的平均以得到噪声较小的结果。代码如下:
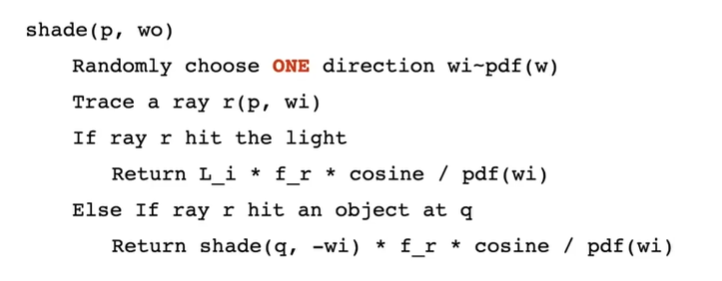
蒙特卡洛方法——1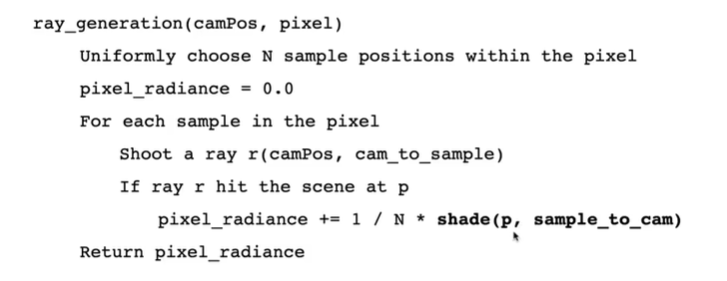
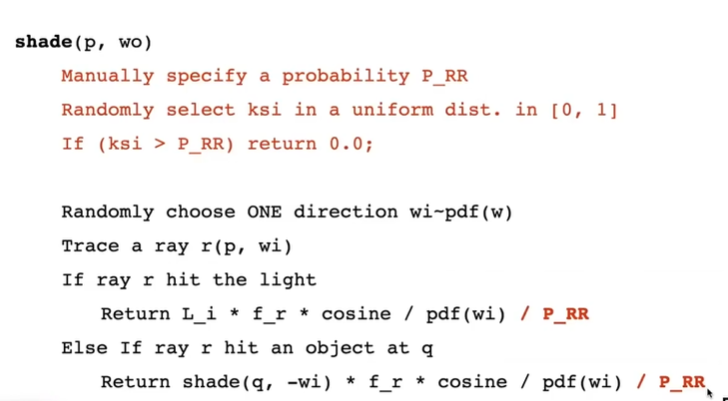
Ray Generation 解决无限递归:采用概率p决定是否往下递归。伪代码如下:
解决无限递归在着色点上采样,光的传播结果大部分都是一种浪费。因此我们将对着色点采样改为对光源采样,这样可以节省大量无用的计算量
- 首先是立体角到光源面积的积分转换,关系:$d\omega_i = \frac{cos\theta’}{||x’-p||^2} dA$,$\theta’$是光源面的法线向量与入射光线的夹角,$||x’-p||^2$光源点到入射点的距离的平方(这个不难理解)
- 得到新的渲染方程:$Lo(a,\omega_o)
=\int{\Omega^+}L_i(a,\omega_i)f_r(a, \omega_i, \omega_o) (n \cdot \omega_i) \frac{cos\theta’}{||x’-p||^2} dA$ - 因此,可以对光源进行简单的均匀采样(即概率为常数),然后计算贡献度和,取平均。
- 注意,有物体遮挡的时候也要考虑进去,这是直接光照和间接光照(其实也就是变相的直接光照)都要考虑的。
- 伪代码如下:
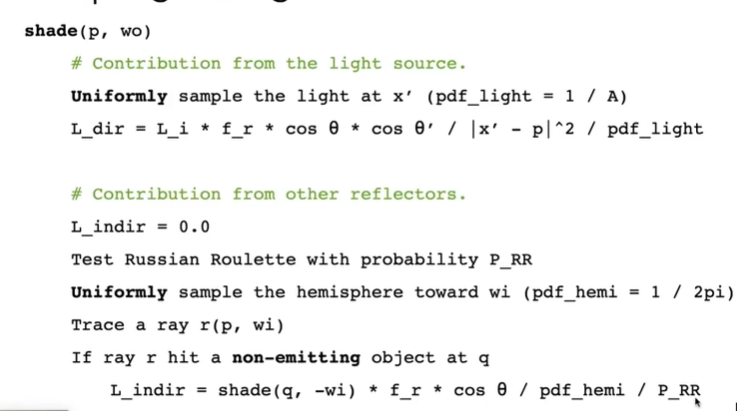
光源采样
Lecture17. Materials and Appearances(材质外观)
- Diffuse / Lambertian Material
- BRDF $f_r = \frac{\rho}{\pi}$,其中$\rho$是albedo,既可以是材质的颜色,也可以是纹理,参照unity里的设置
- Glossy Material(抛光金属)
- Ideal reflective / refractive material (BSDF*)
- 水、玻璃等既可反射也可折射的材质(也有部分吸收)
- 折射定律:Snell’s Law
- $\eta_i sin\theta_i = \eta_t sin\theta_t$
- Specular
- Fresnel Term(菲涅尔项,$\eta = 1.5$)
- 视线方向与法线方向越接近平行,折射就越是严重;反之,反射就越严重。
- Schlick’s近似算法:$R(\theta) = R_0 + (1-R_0)(1-cos\theta)^5$,其中$R_0 = (\frac{n_1 - n_2}{n_1 + n_2})^2$,$n_1,n_2$就是两种介质的折射率。
- Microfacet Material(微表面材料,非常重要!!!)
- 从近处看能看到微表面的细节,能看到凹凸不平的、但是能出现镜面反射的;从远处看能看到平坦粗糙的外观。
- 近处是几何,远处的材质
- 因此,微表面上法线方向不同但大体相同也就是Glossy的材质
- $f(i,o) = \frac{F(i, h) G(i,o,h) D(h) }{4(n,i)(n,o)}$
- F(i, h):$F{Schlick} = C{spec} + (1-C{spec})(1-l \cdot h)^5$(考虑了高光颜色$C{spec}$),菲涅尔项,描述光的反射与折射量
- G(i,o,h):$G_{Cook-Torrance} = min(1, \frac{2(n \cdot h)(n \cdot v)}{v \cdot h}, \frac{2(n \cdot h)(n \cdot l)}{v \cdot h})$ shadow-masking项,可以处理边界处太亮的情况
- D(h):$D_{GGX} = \frac{\alpha^2}{\pi ((n \cdot h)^2(\alpha^2-1)+1)^2}$,法线分布
微表面模型
- Isotropic / Anisotropic Materials(各向同性/各向异性材料)
- 与绝对方位角有关
Lecture18. Advanced Topics in Rendering
- 无偏:unbiased,利用蒙特卡洛方法计算的估计的期望和实际的相等的。(也就是概率上的无偏性)
- 有偏:biased,与unbiased相反。
- 一致:consistent,原本有偏,收敛之后是无偏的。
无偏光线传播算法
- BDPT: Bidrectional Path Tracing
- 从光源和视点同时采样得到半路径,然后连接两个顶点得到整个路径。
- 很难实现,速度也很慢,对某些情况的效果很好。
- MLT: Metropolis Light Transport
- 马尔科夫链的应用:蒙特卡洛积分法中,当采样分布与原函数基本一致的时候得到的误差是最小的。而马尔科夫链就可以生成这种与原函数基本一致的pdf。它可以生成与给定路径相似的路径
- 复杂光路上效果很好。但是很难判断是否收敛
有偏光线传播算法
- Photon Mapping
- 能很好的处理Specular-Diffuse-Specular(SDS)和产生caustics
- caustics: 由于光线聚焦产生的非常强烈的图案
- 实现过程
- stage 1: 从光源发散出photons,不断反射、折射它们,直到达到diffuse的表面。
- stage 2: 从照相机发散出photons,不断反射、折射它们,直到达到diffuse的表面。
- 计算:local density estimation
- 对每个着色点,取其周围的N个photon,求出它们所占的面积,就能求出密度。密度越大的就应该越亮。
- N越小的时候,noise就会比较大
- 能很好的处理Specular-Diffuse-Specular(SDS)和产生caustics
- Vertex Connection and Merging
- BDPT和Photon Mapping的组合
- Instant Radiosity(IR)实时辐射度
- 不能处理Glossy的物体
Lecture19. Cameras, Lenses and Light Fields
Lecture20. Color and Perception
上述两讲内容与基本图形学关系不大,具体可以去看视频内容,这里不做记录。
Lecture21/22. Animation
- 关键帧动画
- 质点弹簧系统
- 粒子系统
- Forward Kinematics
- Rigging(绑定)
Euler方法
- 一阶(前向)欧拉方法
- $x^{t+ \Delta t} = x^t + \Delta t x’^t, x’^{t+ \Delta t} = x’^t + \Delta t x’’^t$
- 受步长$\Delta t$的影响误差可能很大,当然减小$\Delta t$可以减小误差
- 非常不稳定,可能会出现不符合实际规律得到结果
- 中点法(Midpoint method)
- $x{mid} = x^t + \Delta t /2 \cdot x’^t \rightarrow x^{t+\Delta t} = x^t + \Delta t \cdot x’{mid}$
- 上式化简得$x^{t+ \Delta t} = x^t + \Delta t x’^t + \frac{(\Delta t)^2}{2} x’’^t$
- Implicit Euler Method
- 与显式欧拉方法不同,隐式欧拉方法是用下一时刻的速度和加速度等量
- $x^{t+ \Delta t} = x^t + \Delta t x’^{t+ \Delta t}, x’^{t+ \Delta t} = x’^t + \Delta t x’’^{t+ \Delta t}$
- Runge Kutta Method
- RK4,4阶,最常用
- 假设初始条件$\frac{dy}{dt} = f(x, y), y(t_0) = y_0$
- 有$y{n+1} = y_n + \frac{1}{6}h(k_1+2k_2+2k_3+k_4), t{n+1} = t_n + h$
- 上式中$k_{1-4}$的值如下:$\left[ \begin{matrix} k_1 \ k_2 \ k_3 \ k_4 \end{matrix} \right] = \left[ \begin{matrix} f(t_n, y_n) \ f(t_n+\frac{h}{2}, y_n+h \frac{k_1}{2}) \ f(t_n+\frac{h}{2}, y_n+h \frac{k_2}{2}) \ f(t_n+h, y_n+hk_3) \end{matrix} \right]$
- Position Based / Verlet Integration
大规模粒子的模拟方法
- 拉格朗日法(质点法)
- 对每个单独的粒子计算其运动变化规律
- 欧拉法(网格法)
- 划分空间,以空间为单位考虑
- Material Point Method(MPM)
- 现在非常热门的方法,也是拉格朗日法和的结合